 制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ) オビツ11サイズ(その10)球体配置
頭と手は初期編集でも大変なので先に簡単な球体配置を行います。
スケールマスターでサイズを変更する球体があります。「すべて」のオフを忘れないように。念の為に別名保存も。
球体作成
以下、オビツ11に合わせて球体をローポリゴ...
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ) 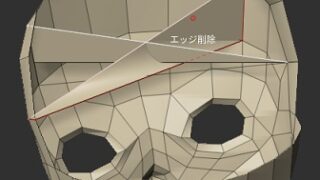 制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)  制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ) 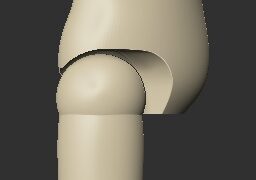 制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ) 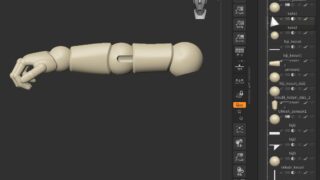 制作方法(オビツ11サイズ)
制作方法(オビツ11サイズ)