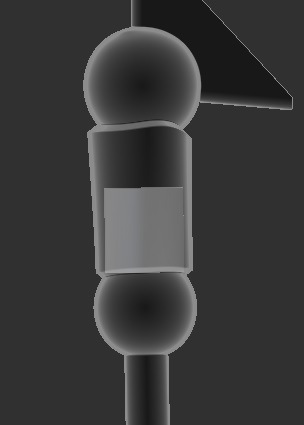
スリット
丸ゴムは1本丸(約1.2mm)を想定します。
※100均のもので大丈夫です。

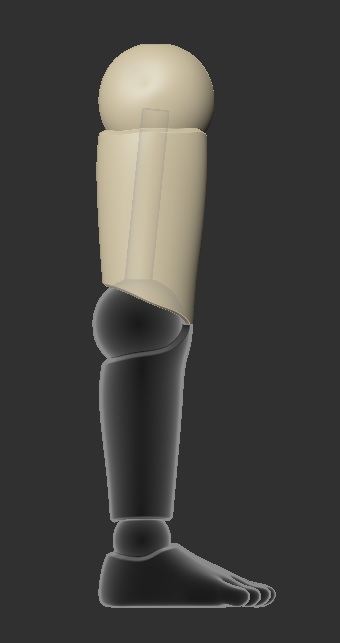
前回の投稿に続いて脚を例にします。
まずは股関節のゴム通し穴を開けるブーリアン用サブツールを作ります。
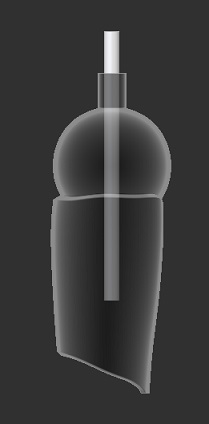
股関節を複製してPolyCylinderに差し替え
直径2.6mm(ゴム2本分と適当なクリアランス)へサイズ変更。
次はスリット。
それを複製して直径1.4mm(ゴム1本分と適当なクリアランス)に。
上半分のスリット方向半面部分をマスクから除外。
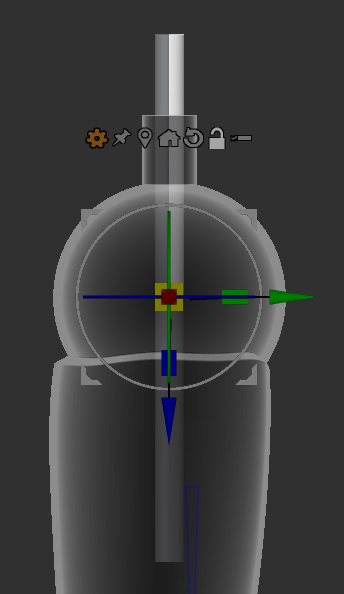
95度程度(丸ゴムの太さを考慮)回転。
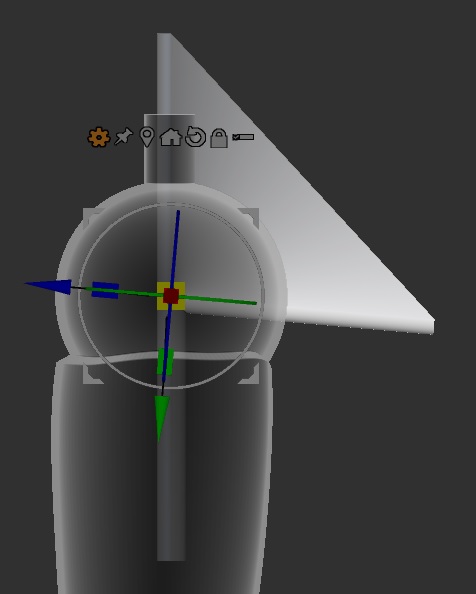
「DSSivでブーリアン」。
同様に下腿も関節受けからスリットまで作成します。

ゴム固定
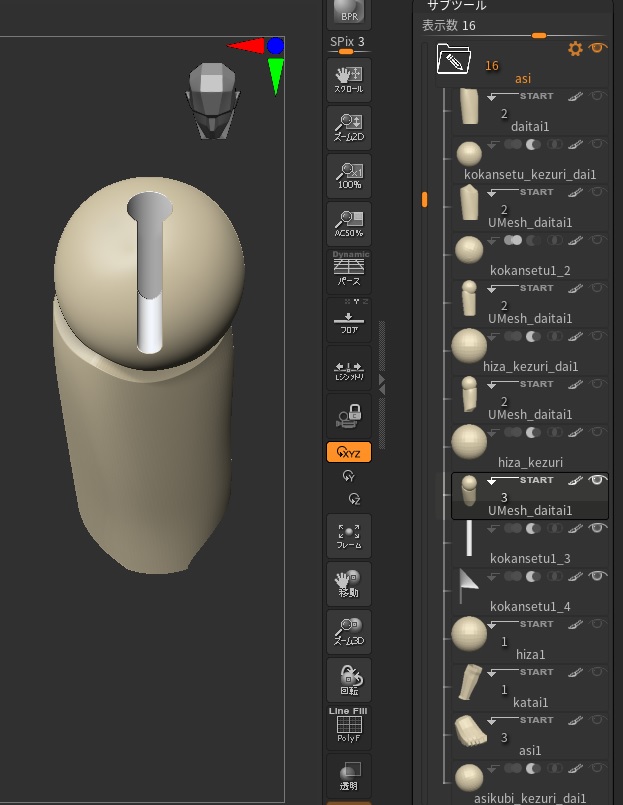
足もまずブーリアン確認用球体で削り
結果をマスクして球体を選択。
複数選択で結果の足のみを選択して
球体の中心へ縮小します。

次に球体を複製、サイズを0.1mm縮小して足を削ります。
ここでは仮に名前の末尾に_kezuri_utiと付けます。

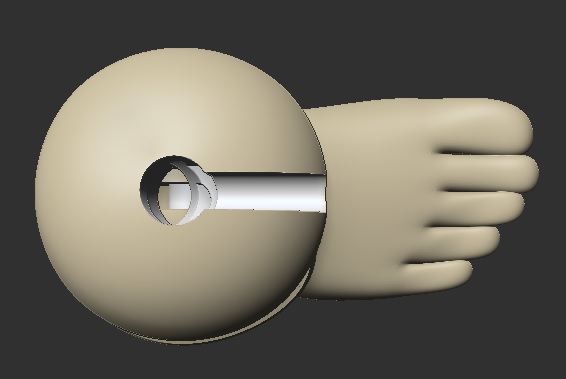
画像のようにS字フックを掛ける直径2mmのPolyCylinderを作り
球体にPolyCubeで溝を入れます。
S字フックの厚みは1mm以下を想定しているので
厚さ1mmのPolyCubeで削ります。

「DSSivでブーリアン」を行い
「シェルごとに分割」を行って分割できずに中断されることを確認します。
※足首と足が付いていないことがあるので確認します。
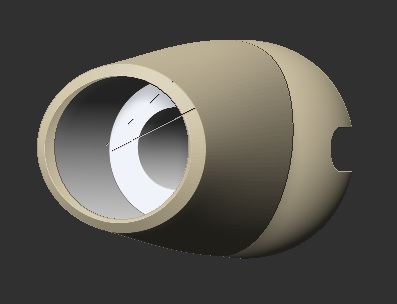
ゴム通し
股関節から足までゴムが通る場所が確定したので
ゴム通しのブーリアン用PolyCylinderを作成します。
直径は2.6mm(ゴム2本分と適当なクリアランス)。

股関節から覗いて途中で狭くなる箇所が無く
足の円筒が見えれば大丈夫です。
心配であればパーツの厚みを見ながら
PolyCylinderの直径を大きくしても大丈夫です。
※スリット作成時のブーリアンで既に少し削れています。
気になるようであればその段階で関係するサブツールを揃えて調整します。
「DSSivでブーリアン」 。
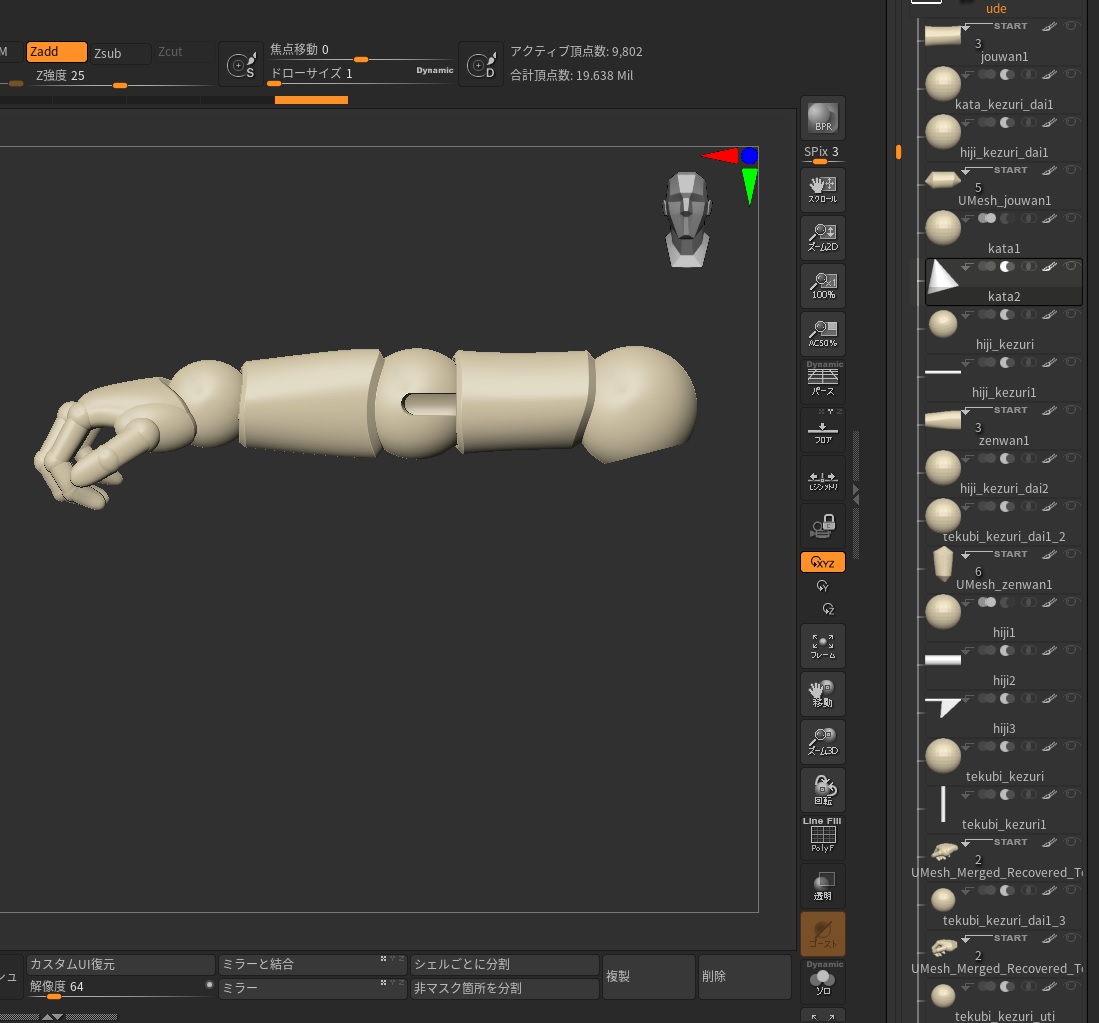
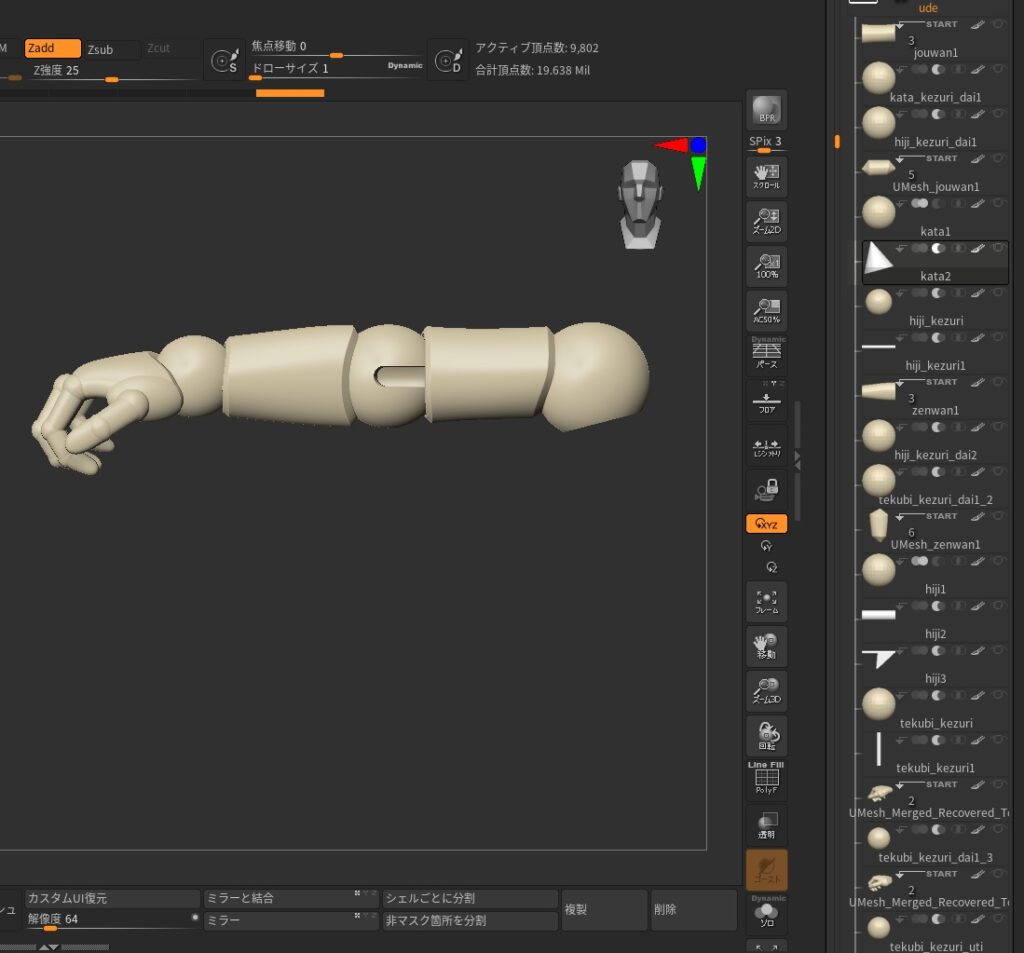
腕
肩以外は脚と同じ作業を行います。
肩は腕を下げた状態で可動範囲を確認しながら
Cone 3Dなどで削ります。

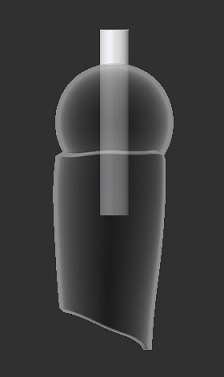
S字フックの収納
前腕の手首側と下腿の足首側に
S字フックが収まるスペースを作成します。
まず下腿から。
深さは5mm、幅は2.3mm、長さは関節受けの縁までにしてみます。
※ゴム通しの位置を再調整しています。
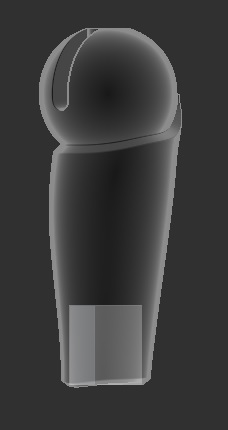

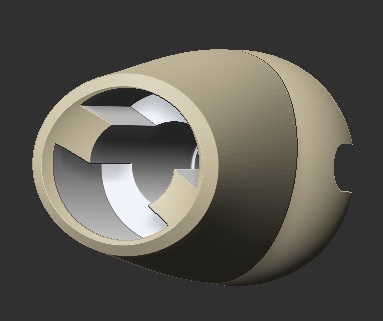
前腕。
深さは下腿と同じ5mm
他は円形のまま関節受けの縁まで。
補強とS字フックを掛ける場所として画像のような構造にします。
作り方は色々試して下さい。
可動範囲が少し制限されるので作らなくても大丈夫です。
※画像はブーリアンの交差で
内部構造物が前腕からはみ出ないようにしていますが他の方法もあります。
ブーリアンの交差は頭でも使用する予定です。