可動範囲の確認
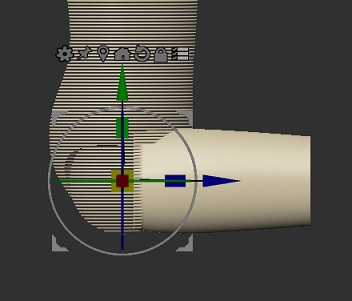
手と同様に球体を選択してから
サブツール複数選択を行った後に
球体を中心として回転させて可動範囲を確認します。
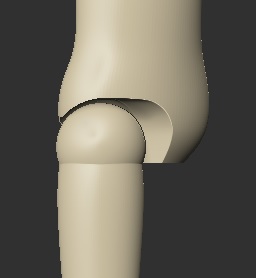
ブーリアン用サブツール
股
胴体や大腿のポリゴンを調整して可動範囲を確保することもできますが
オビツ11のように胴体側を大きく削る場合は
画像のようにブーリアン用のサブツールを作成します。

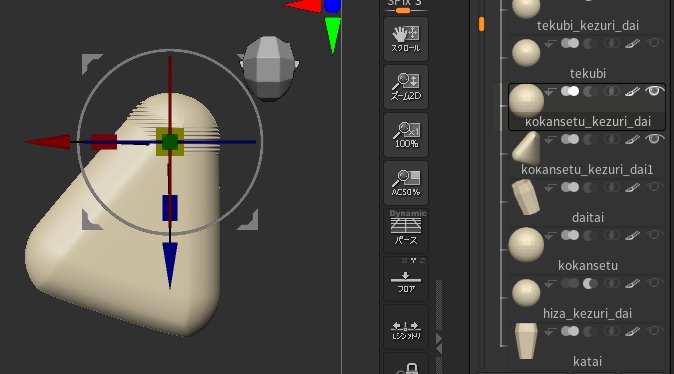
股関節のブーリアン確認用球体を複製。
後半分をマスクして前へ伸ばす。
内側半分をマスクした後
ブーリアン確認用球体を選択。
マスクした球体をサブツール複数選択して回転。
マスク箇所を変更しながら回転させて作成しています。
二の腕・太もも裏
腕や脚もポリゴンを調整して可動範囲を確保することもできますが
二の腕・太もも裏をオビツ11のように削る場合は
画像のようにブーリアン用のサブツールを作成します。
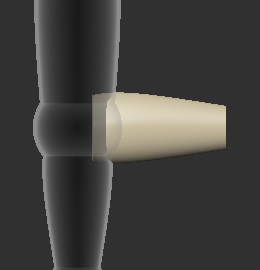
肘・膝は回転方向が決まっているので
前腕・下腿を複製・回転したものをブーリアン用サブツールにします。
サブツール複数選択の前に
元のサブツールを非表示にして選択されないようにします。
作り込み
スリットやゴム通し・固定についてまだ記載していませんが
造形的には作り込むことが可能な状態になりました。
作り込むと言ってもオビツ11サイズなのでパーツが小さく
3Dプリントしても分からない可能性があります。
また、パーツの左右も分からなくなることが多いので
大きな特徴がないパーツは左右共通にすることがあります。
ローポリゴンモデリングはここまでで
次はゴム引きに関係する投稿になります。

