構造
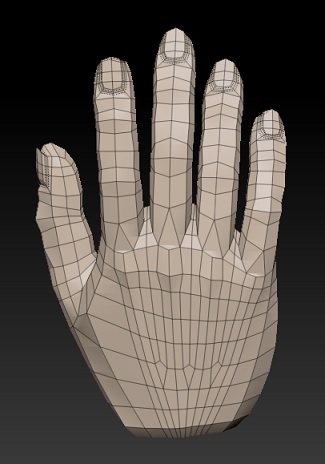
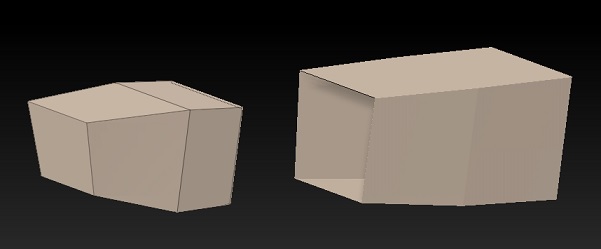
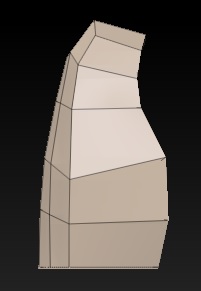
画像は一体型のローポリゴンベース。
ギズモを関節に移動して
マスク有無で指を回転させています。
ポーズを付けるのが難しいです。
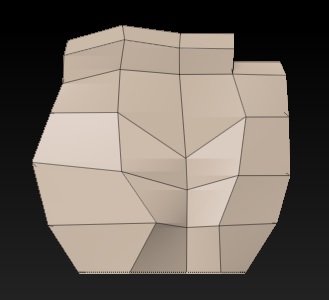
爪有りはエッジが多くなってしまうので
爪周りにクリースを使っています。
指断面は八角形。

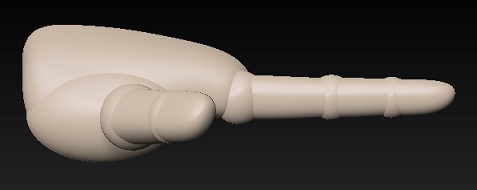
画像は可動指を想定した構造で
デフォルメされています。
関節球体を中心としてしてサブツール複数選択で指を回転させるので
ポーズを付けるのが簡単です。
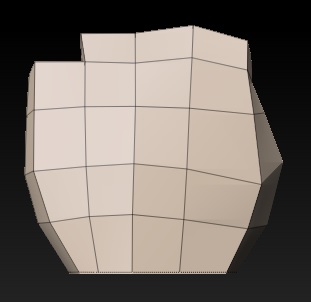
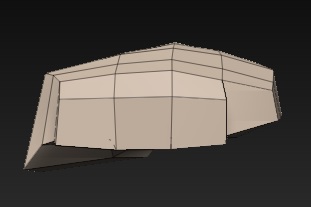
爪無しで指断面は四角形。

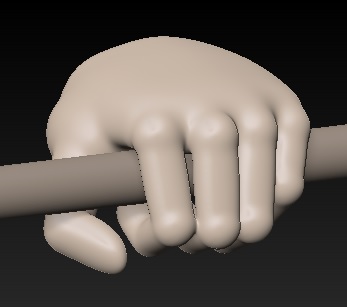
硬い感じになるので一体化した後に
Smoothブラシなどで調整するのが良さそうです。
※画像は関節部分に少しSmoothブラシをかけたもの。
今回はこの方法で進めます。
※以前に作成したものを使用して説明します。
指
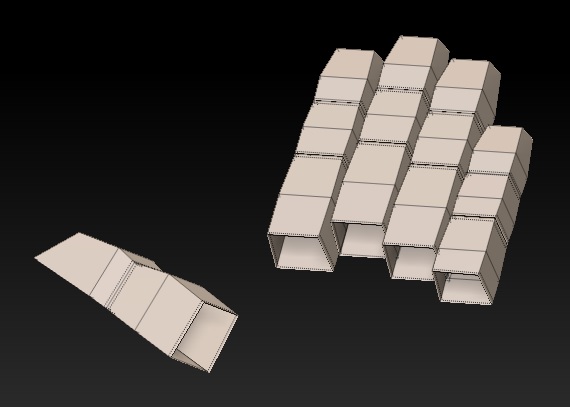
腕や脚と同じポリゴン構成です。
接続部分にはクリースを設定しています。
パーツはサブツールごとに分けます。
30個ほどになるので手専用のフォルダを作成します。
ここでは仮にte_baseというフォルダ名にします。
フォルダを複製してポーズごとに管理します。

指を一本作成したら各パーツの複製を作成。
元の指を非表示にして選択されないようにしてから
複製した指をサブツール複数選択で移動して調整します。
掌
可動指にすることを想定していたので参考までに。

ポーズ
基本ポーズのフォルダは残します。
複製してポーズごとにフォルダを作成します。
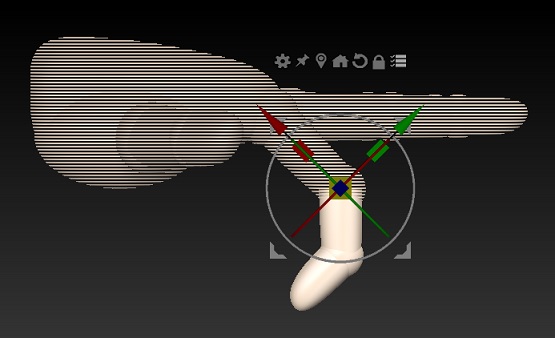
球体を選択してから
サブツール複数選択を行った後に
球体を中心として回転させます。
画像のように回転させた場合、
指先の球体の中心は元の位置に残ったままになるので
指先を曲げる場合は中心のリセットが必要になります。
全体のバランスを見て調整する必要があると思うので
とりあえずパーツが揃った段階で次へ進みましょう!

