不要なポリゴンの削除とエッジのクリース設定
各サブツールで作業を行うときに
「両面」表示をオンにします。
上腕から。
ブラシをZModelerにして
適当なポリゴンの上で「スペース」。
現れたウィンドウが「POLYGON ACTIONS」であることを確認したら「削除」を選択。
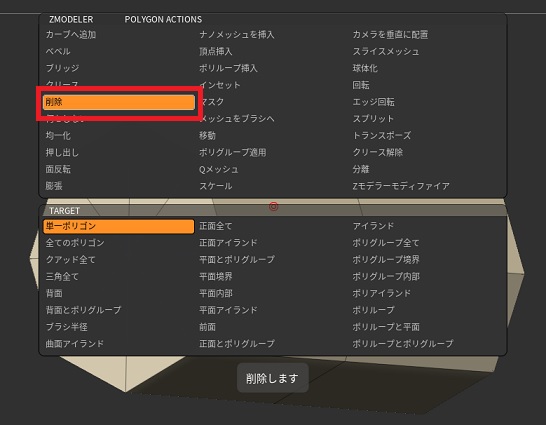
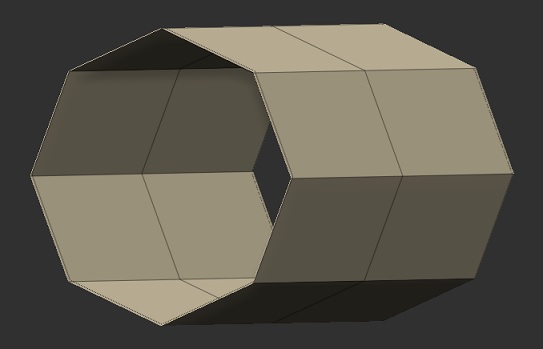
円筒蓋部分のポリゴンを選択して削除します。
間違えてエッジを選択してしまったら「Ctrl」+「Z」でやり直し。
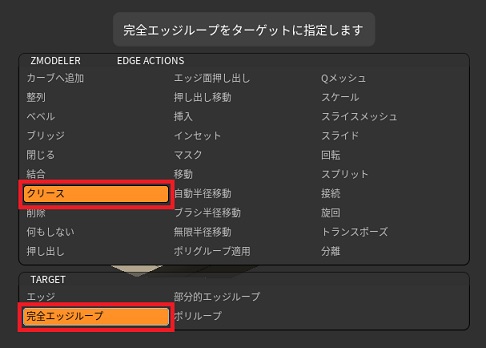
次は適当なエッジの上で「スペース」。
現れたウィンドウが「EDGE ACTIONS」であることを確認したら
「クリース」を選択、その下の「TARGET」で「完全エッジループ」を選択します。
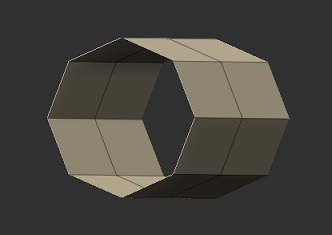
円筒縁部分のエッジを選択してクリースを設定します。
同じ作業を前腕と大腿、下腿、胴に行います。
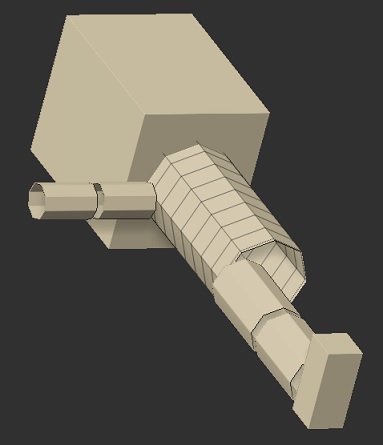
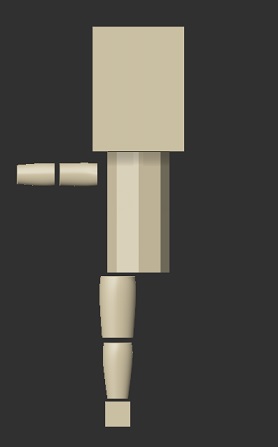
大まかに造形
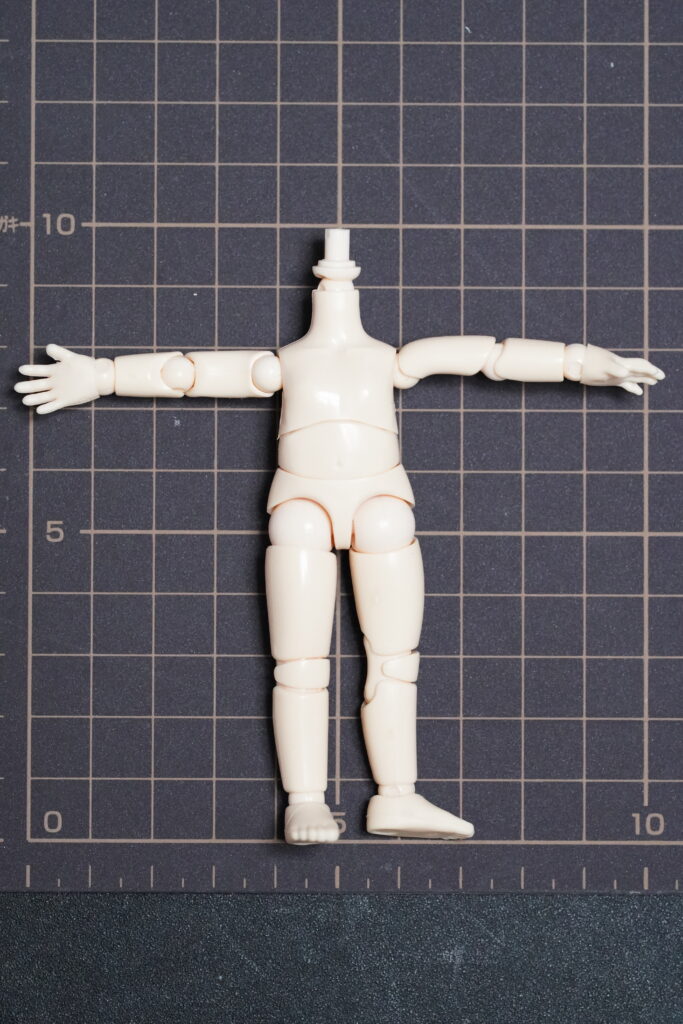
とりあえずオビツ11の形を参考に。
上腕から。
「Ctrl」+「Alt」で中央部分のエッジを全部選択。
ギズモで肩側へ移動してXYZスケールで少し拡大。
真上からの視点に変えて
そのまま後半分をマスクして
ギズモを動かして前側を凹ませます。
選択部分を変えて凹ませて画像のようにします。
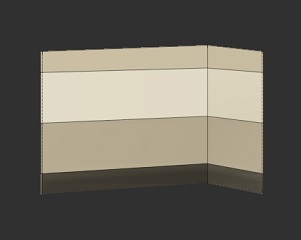
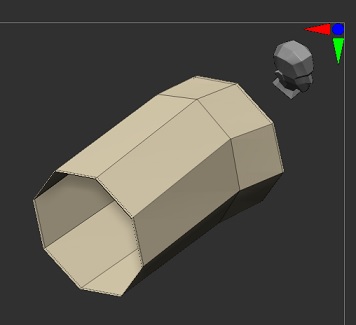
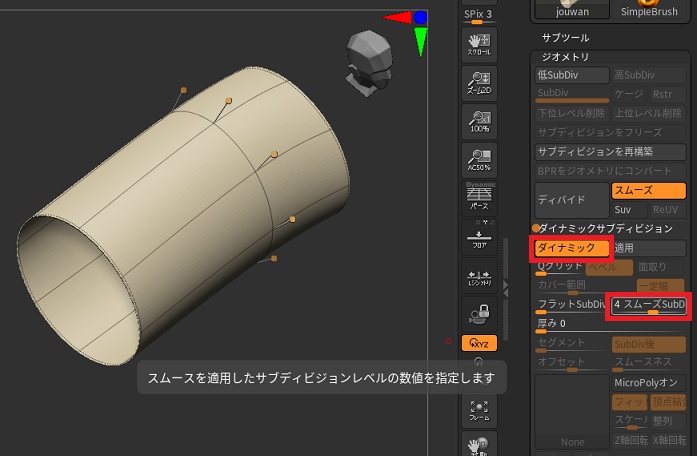
ダイナミックサブディビジョン「ダイナミック」を有効にします。
「スムーズSubDiv」の値を4にします。
次は前腕。
こちらも中央部分のエッジを肩側へ移動してXYZスケールで少し拡大します。
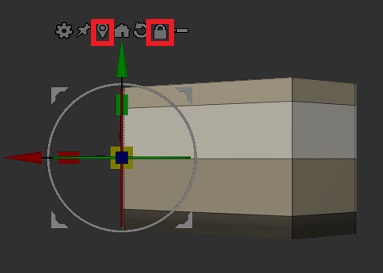
さらに手側のエッジのみを選択して「ロック解除」後、
「マスクなしへ移動」で中心を移動してから少し縮小します。
「ダイナミック」を有効。
大腿、下腿。
中央部分のエッジを胴側へ移動してXYZスケールで少し拡大します。
さらに足側のエッジを少し縮小、
下腿は全体を大腿に比べて少し細く調整します。
「ダイナミック」を有効。